
Abstract
Soft Robotics is the specific sub-area of Robotics, which deals with the construction of robots from highly compliant material. Soft robots are used and developed in various fields. Among other things, attempts are being made to use soft robots to optimise machine production processes and sorting sequences. The American company "Soft Robotics" developed a robot that can imitate the movement of a human hand. At MIT, a soft robot was developed which can imitate the fins of a fish and even has the ability to swim with real fish. Research is also being conducted to see whether the silicone cushions could also be used as prostheses in the future. Soft Robots are also attracting more and more attention in architecture, for example as acoustic panels or actuated room modifiers.
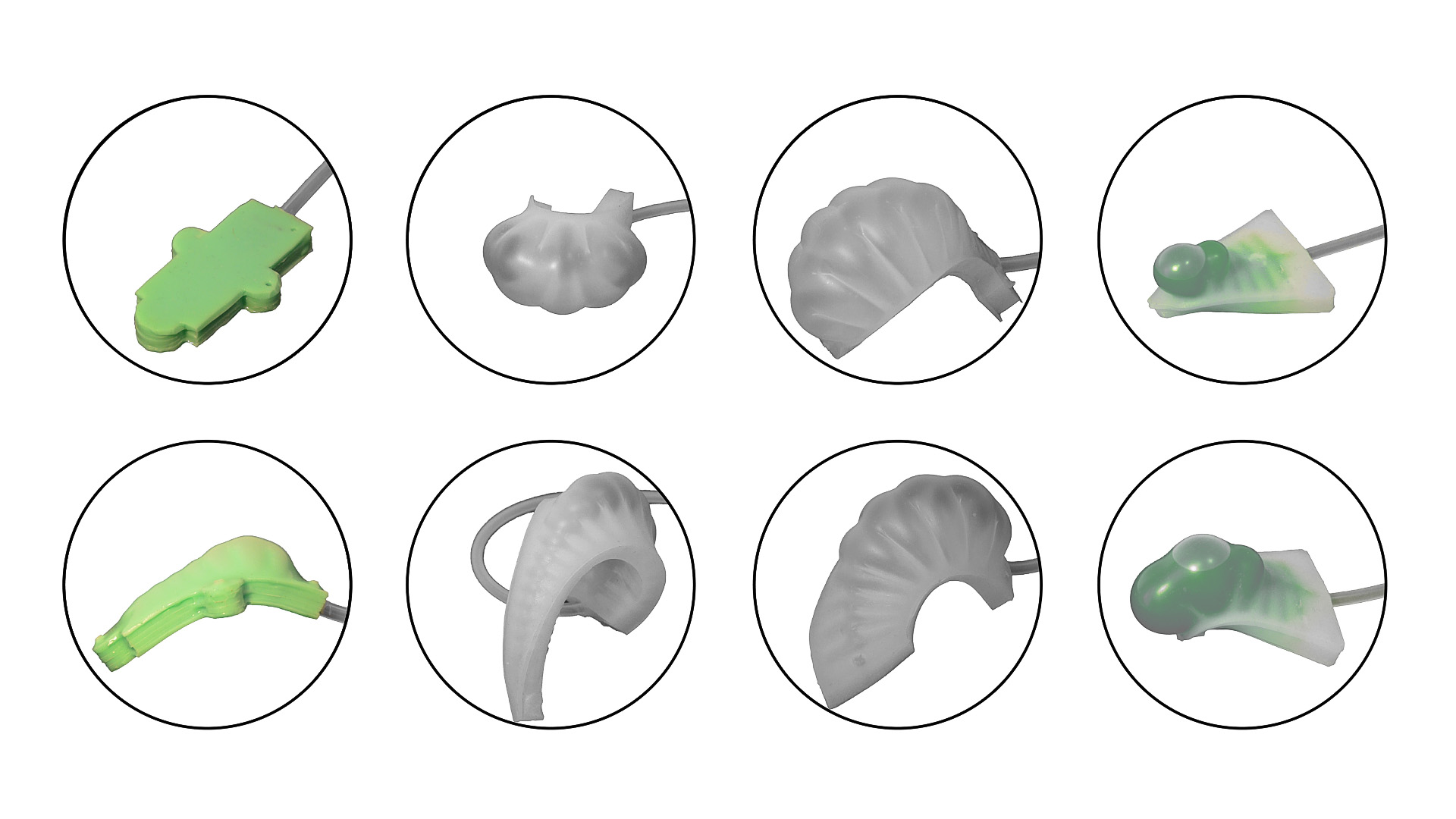
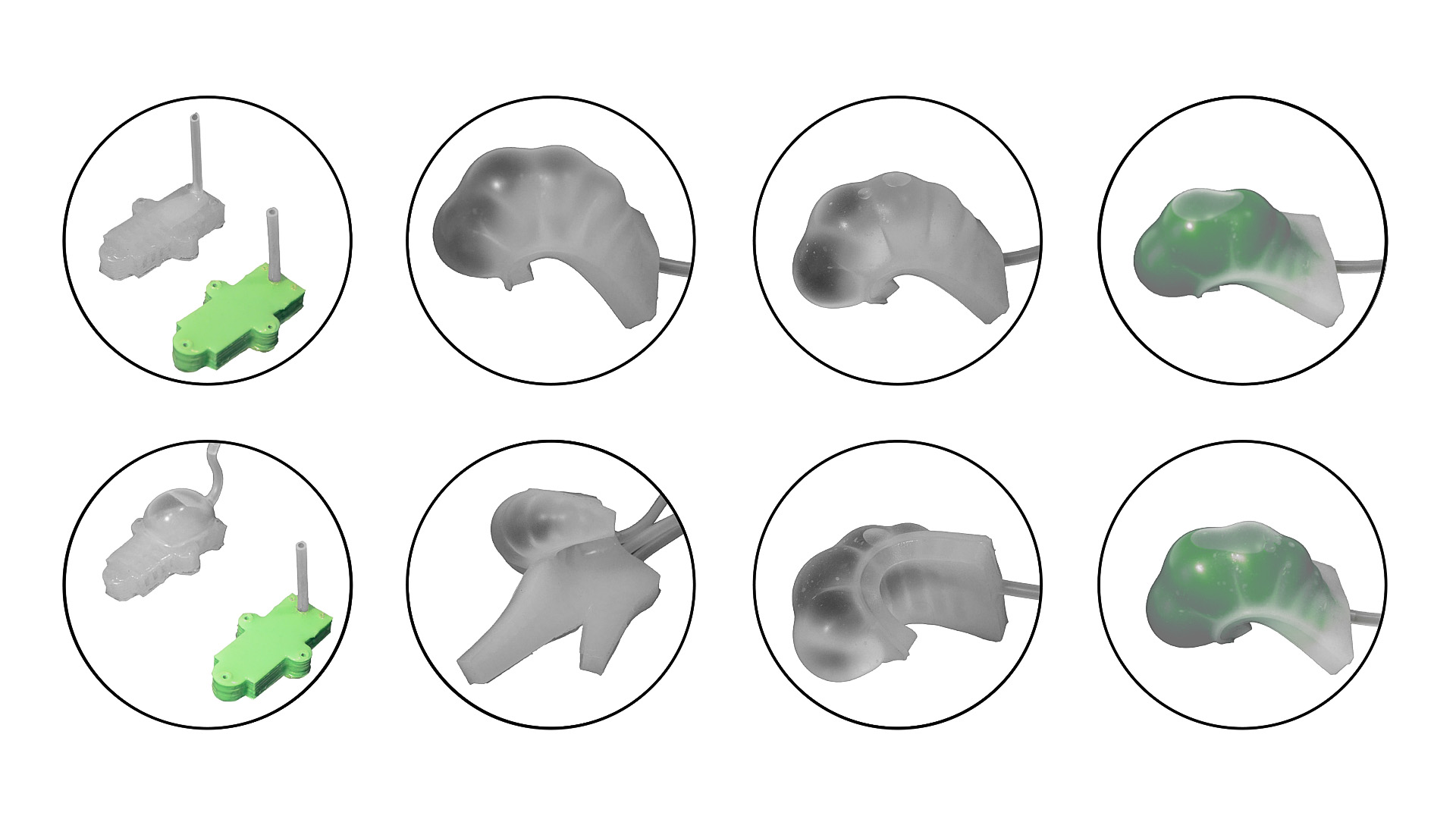
The air chambers of the silicone cushions depend on the outer shell of the robots. They always run orthogonally to the outer edge, thus giving the cushion a ribbed structure on the outside when inflated. During production, it is important to ensure that the underside of the robot is thinner than the top. If this is the case, the cushion will not behave like a balloon and inflate in all directions, but rather like a muscle that develops in one direction. In this way the robot gets its typical look and can be used for useful functions.
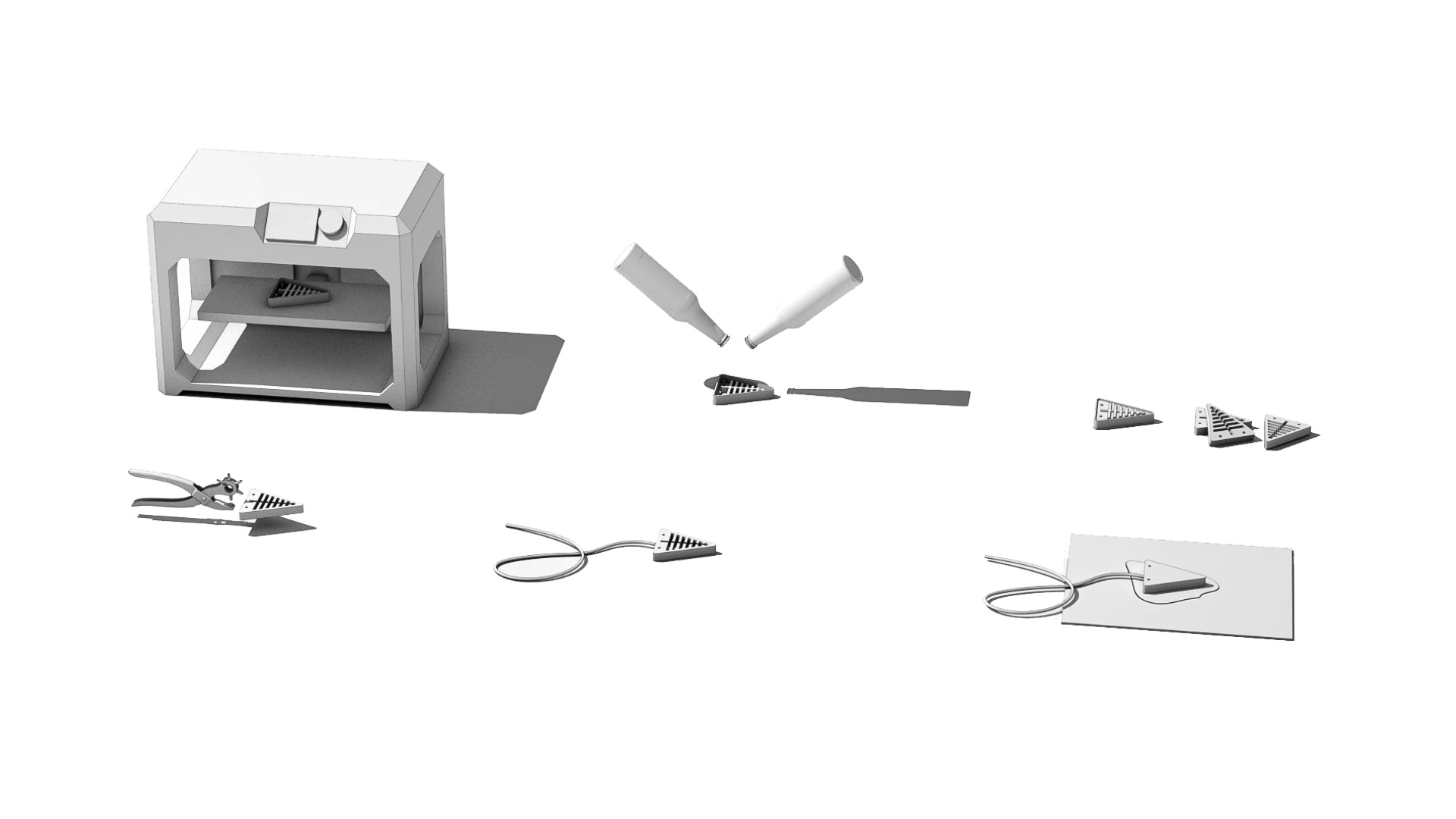
First of all, the negative mould of the silicone cushion must be digitally developed and designed so that it can be produced in the next step by layering materials or using 3D printing processes. The silicone must then be mixed in the appropriate ratio and filled into the mould. The Ecoflex silicone takes approximately five to seven hours to cure on this scale (depending on humidity and temperature). The next step is to apply a thin layer of silicone to a smooth surface. The Soft Robot is placed with the oven side on the silicone layer and lightly pressed on. As soon as this layer has set, the silicone cushion is ready and can be inserted.
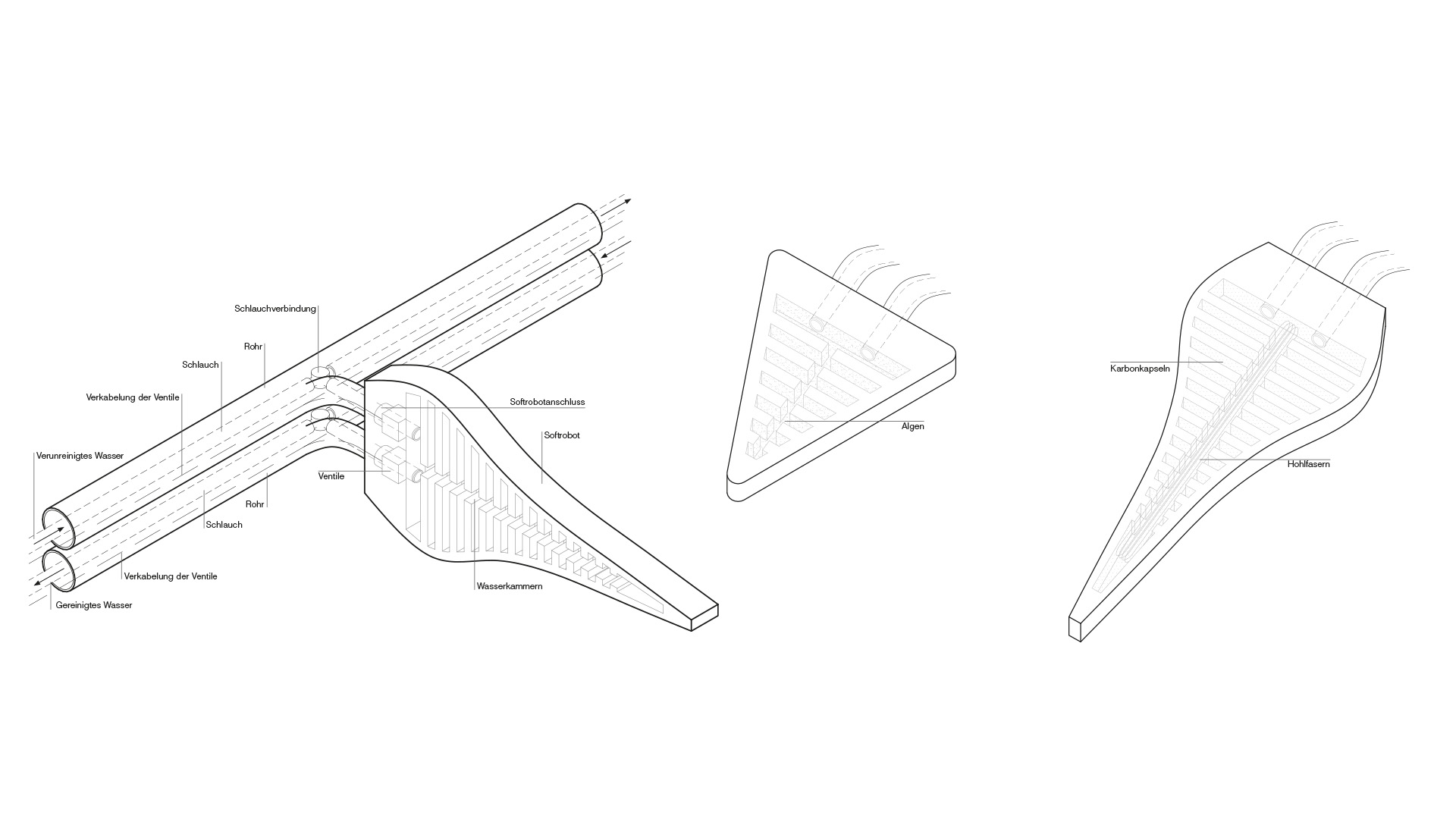
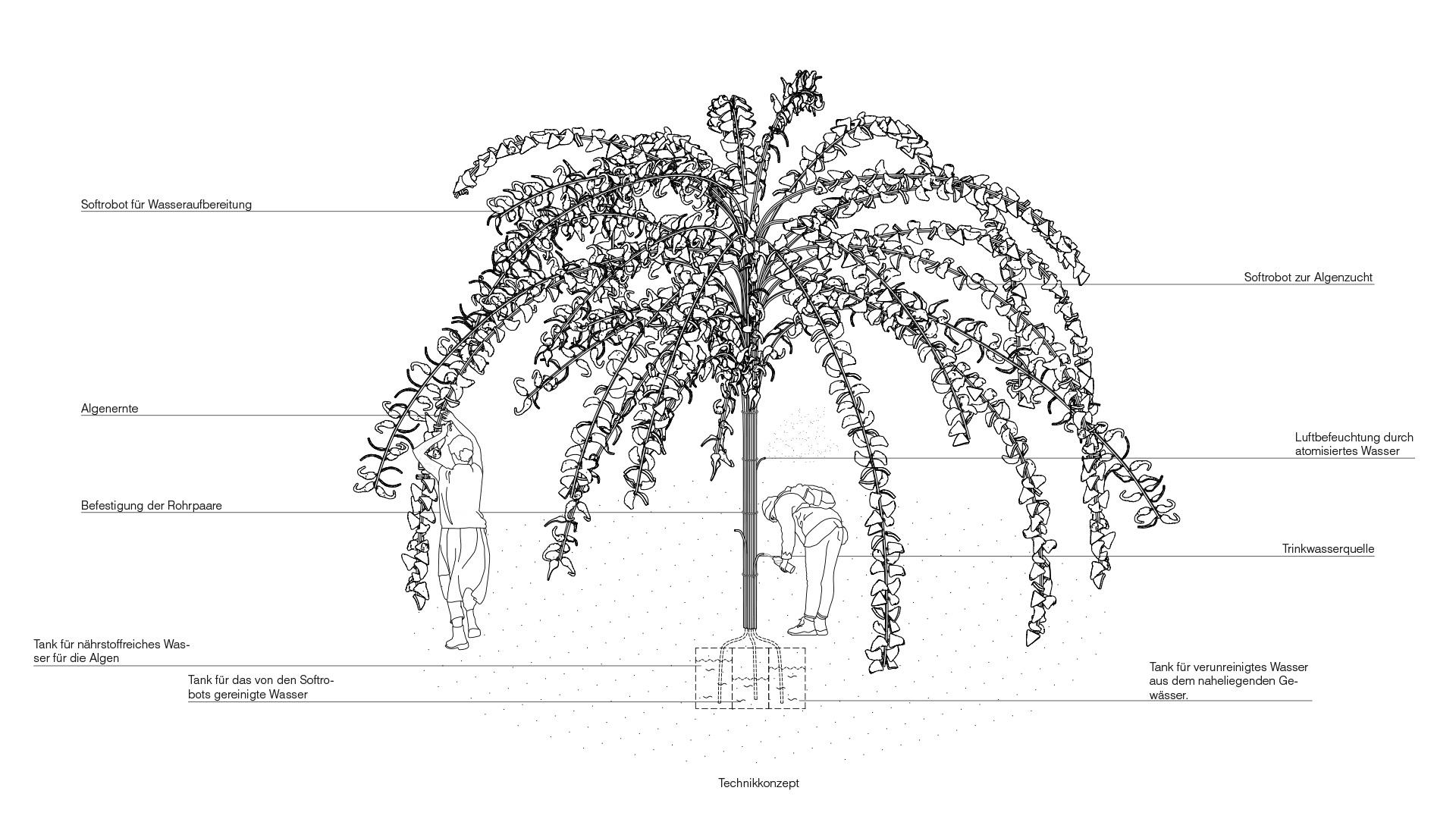
The tested moulds are modelled on nature and should serve a certain purpose. The basic triangular shape was used to test how the material behaves when the body tapers. Later on, this basic shape, which is modelled on a leaf, was to be used as a shade and algae culture container. The rectangular shape is used to test the hardness of the material. With the simplest basic shape, the material can be tested without being strongly dependent on the shape. A design application for this small robot could be, among other things, the animation of a room installation. A shape that resembles a three-leaf clover was tested for its gripping abilities. Furthermore, this shape could be used to serve as a kind of catch basin and in my case contribute to the collection of rainwater. A longer basic shape was developed to be able to bend far enough to allow objects to be gripped and held.
An Arduino board is used to control the system. Water pumps and valves are used to supply the system with water and air. The code on the Arduino makes it possible to program several motion sequences so that each soft robot in the system can be controlled individually or in combination.
As the robots are not only able to perform mechanical movements, but also have the ability to pick up, deliver and save, it would be possible to use them in other areas such as air treatment, water filtration, algae cultivation, etc.
Info
Author:
Tim Germershausen
First Examiner:
Prof. Mirco Becker
Second Examiner:
Prof. Michael Schumacher
Summer Semester
2018