

Abstract
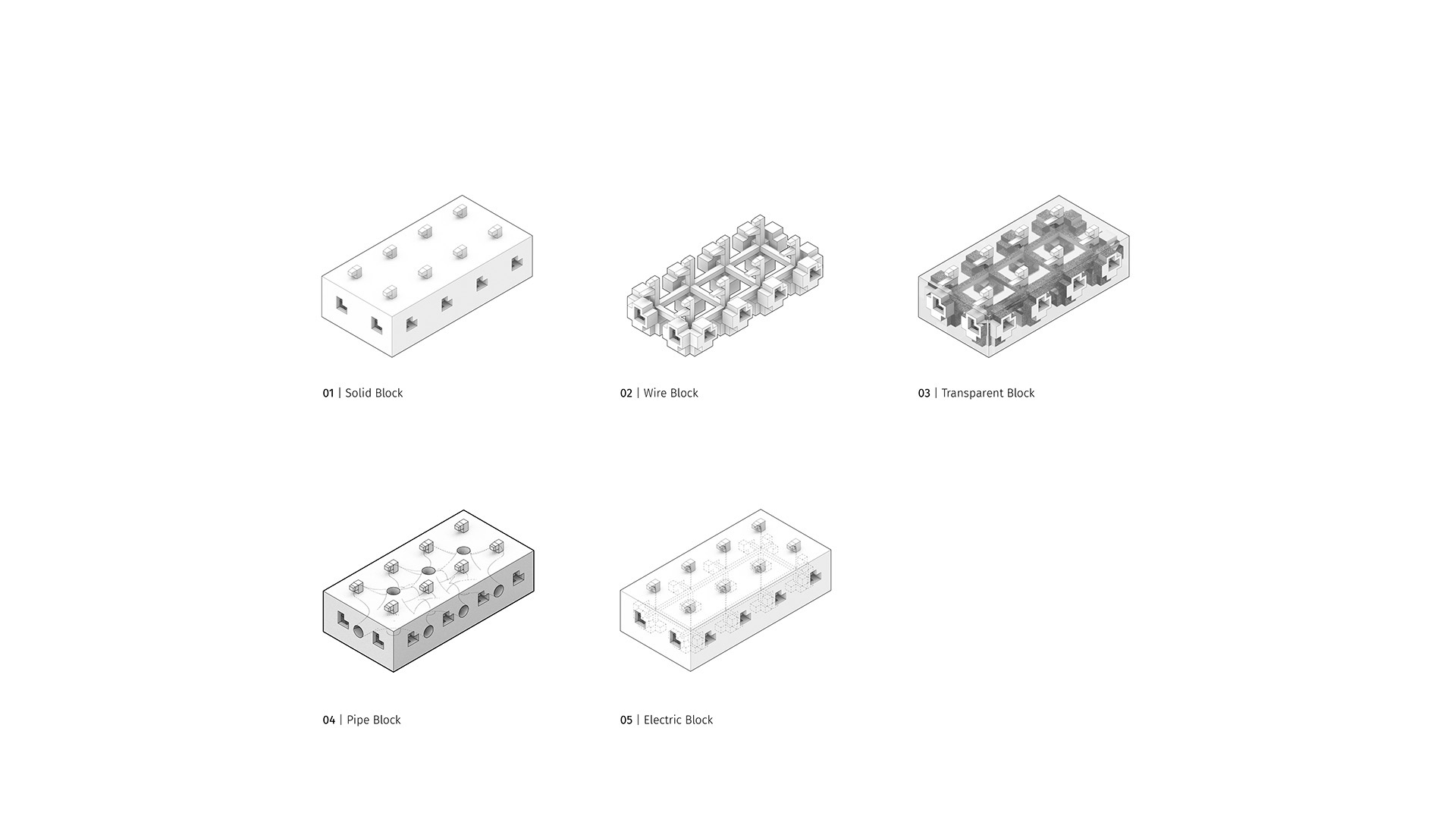
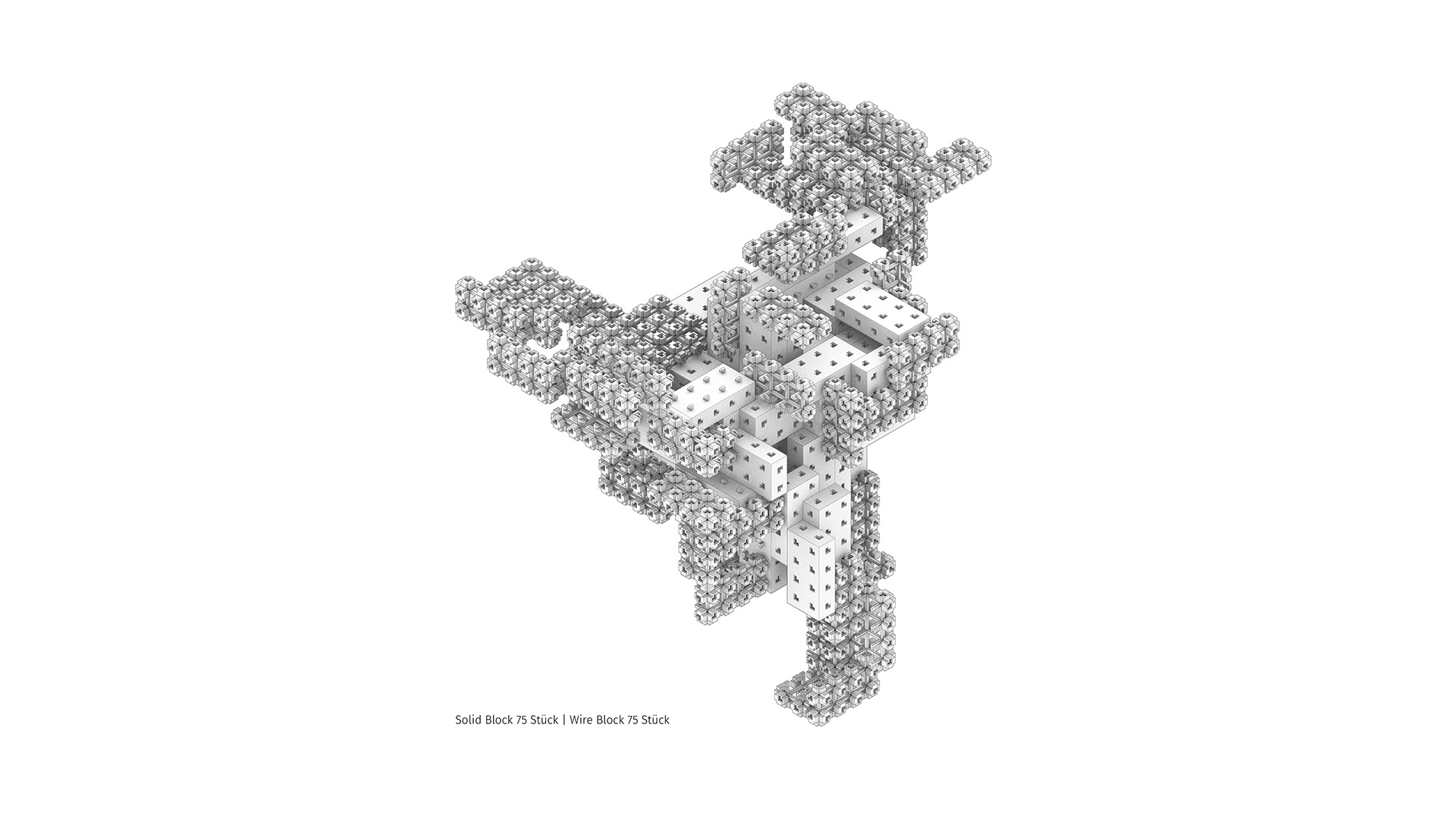
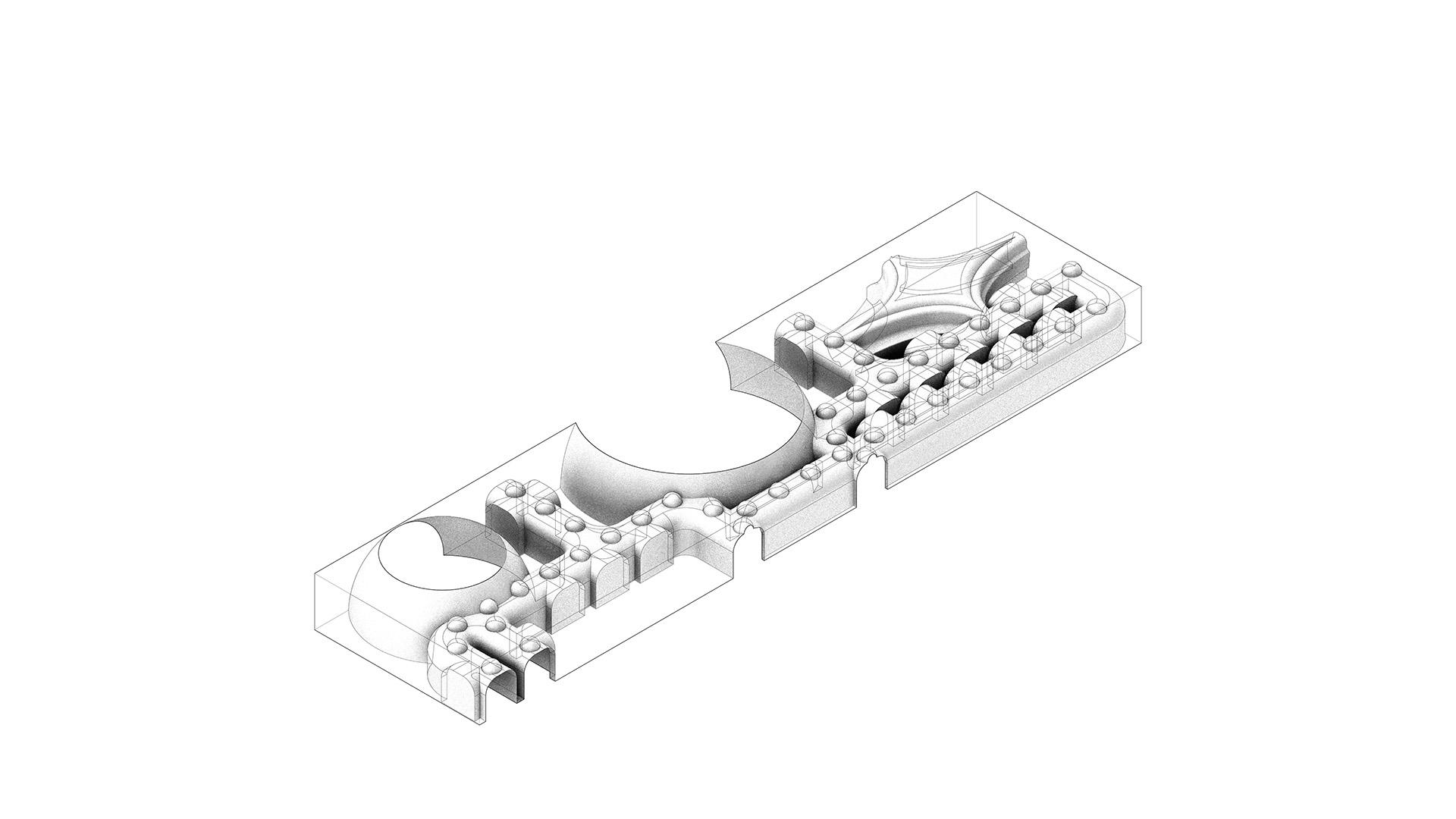
The development of a module and its connection by plug-in mechanisms are tested in this thesis. The connection, which is resistant to torques and tensile forces, can form a variety of shapes and volumes due to the size of the module (15mmx30mmx60mm). If one imagines that these modules are connected in a large volume to form a room-sized aggregation, the transition of the created volumes between architecture and furniture is fluid.
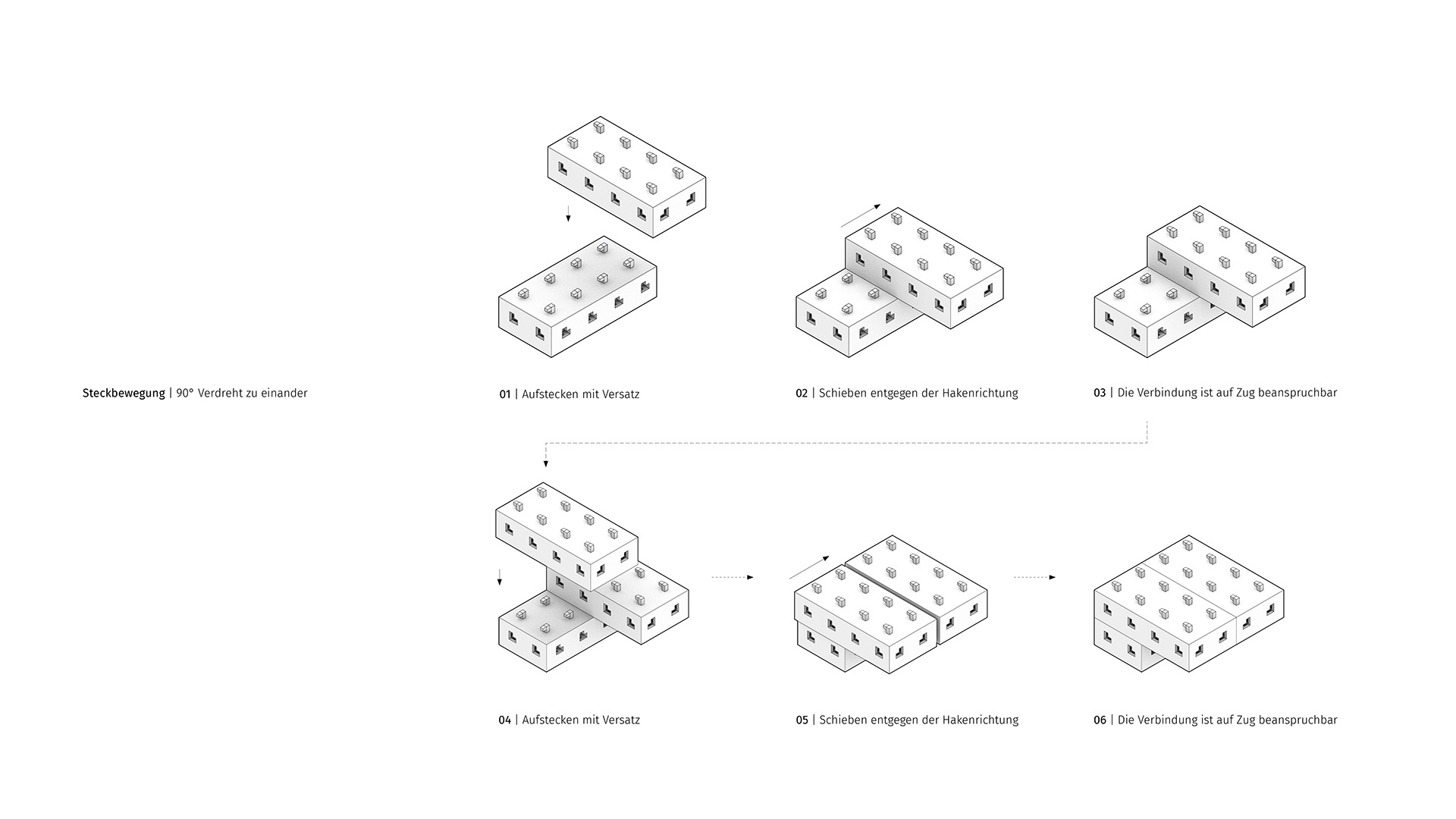
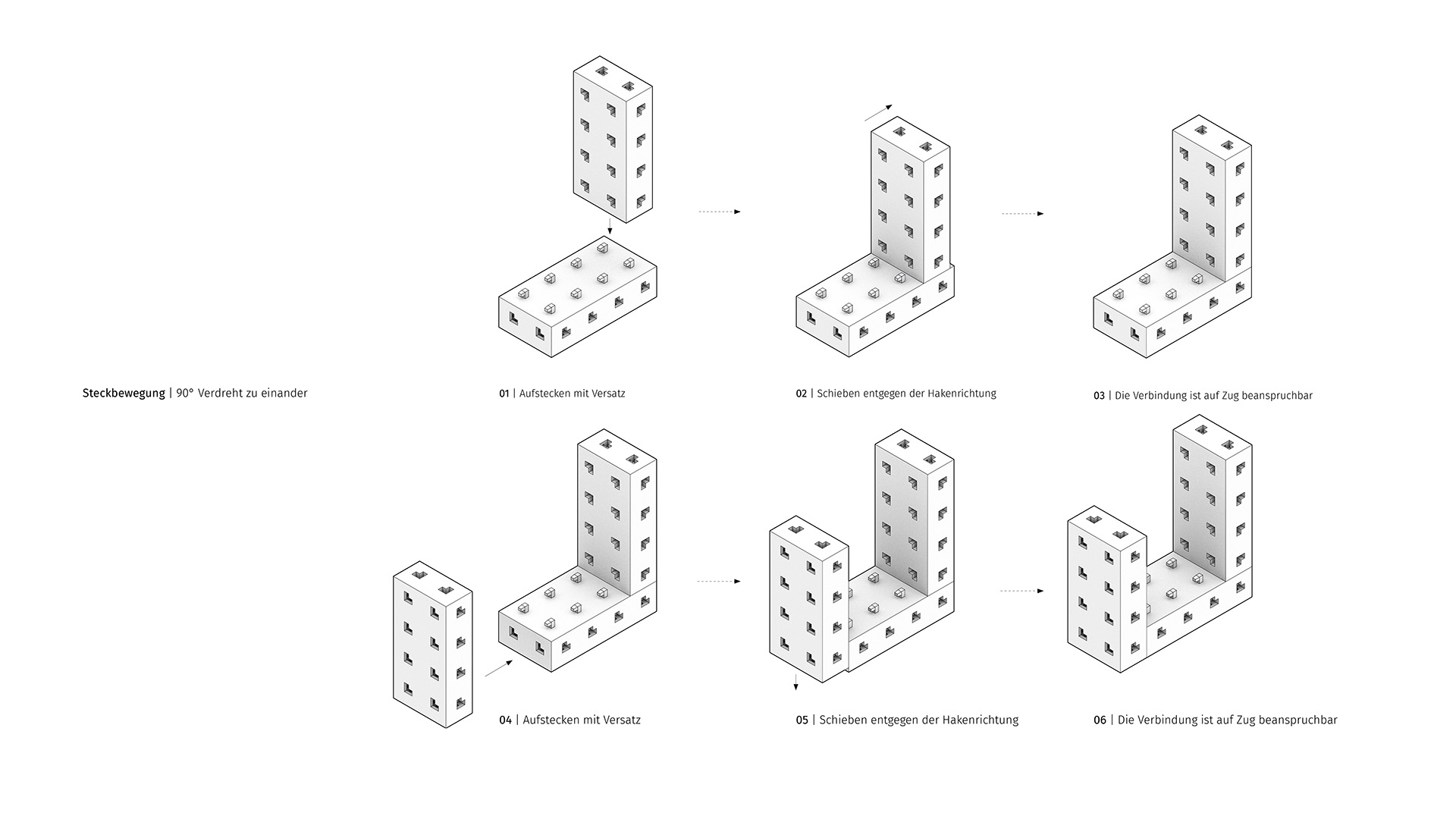
Since the mechanism of the plug-in connection requires more space during assembly than the size that defines the module, the order of the modules to be plugged in is decisive and requires a great deal of logistical effort, which can be made possible by robots.
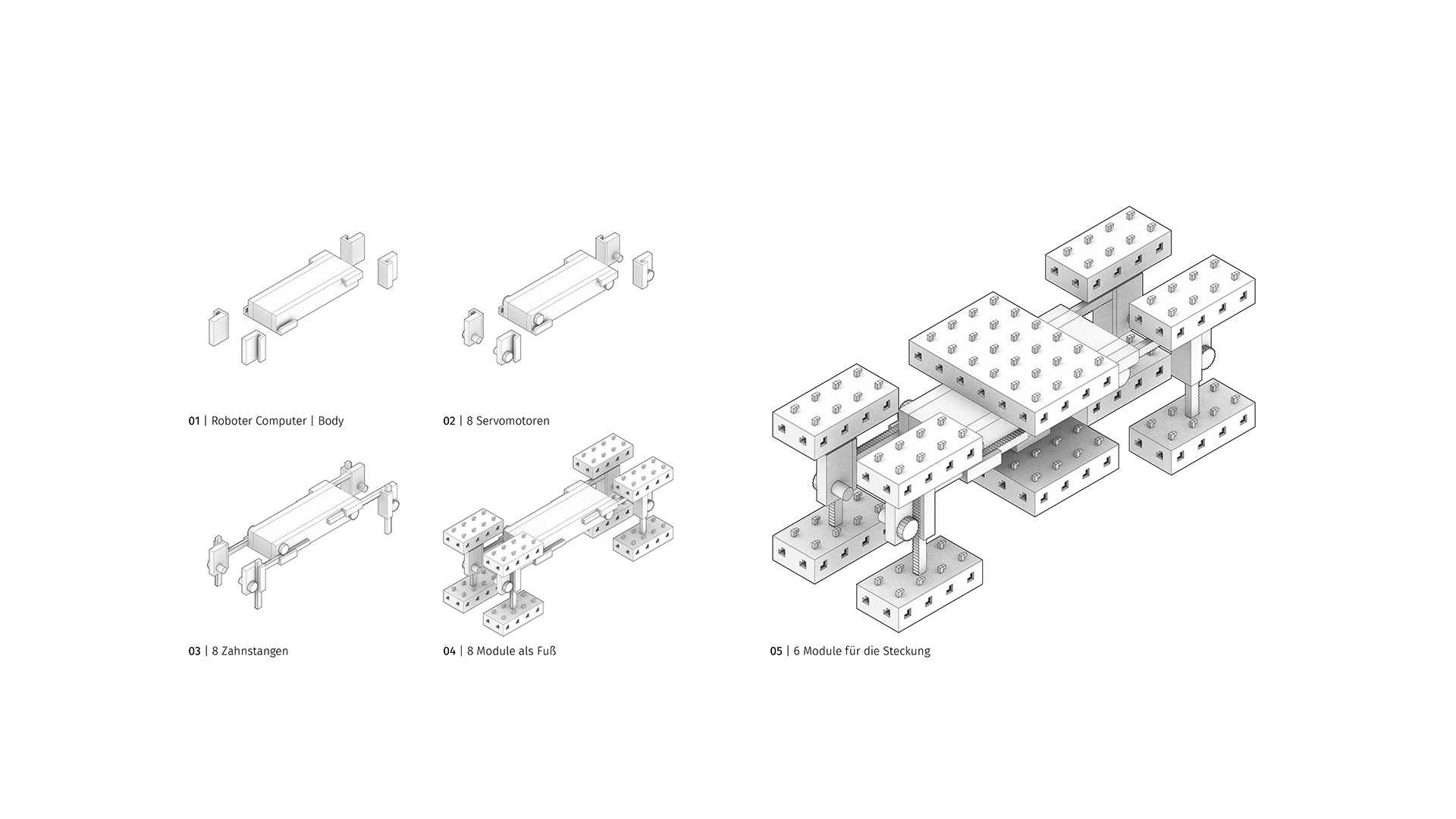
The robots, which take over the task of stretching and locomotion, consist partly of the modules themselves. In this system, the mechanism makes it possible to have the modules inserted by robots in X, Y and Z directions (up, down, sideways).
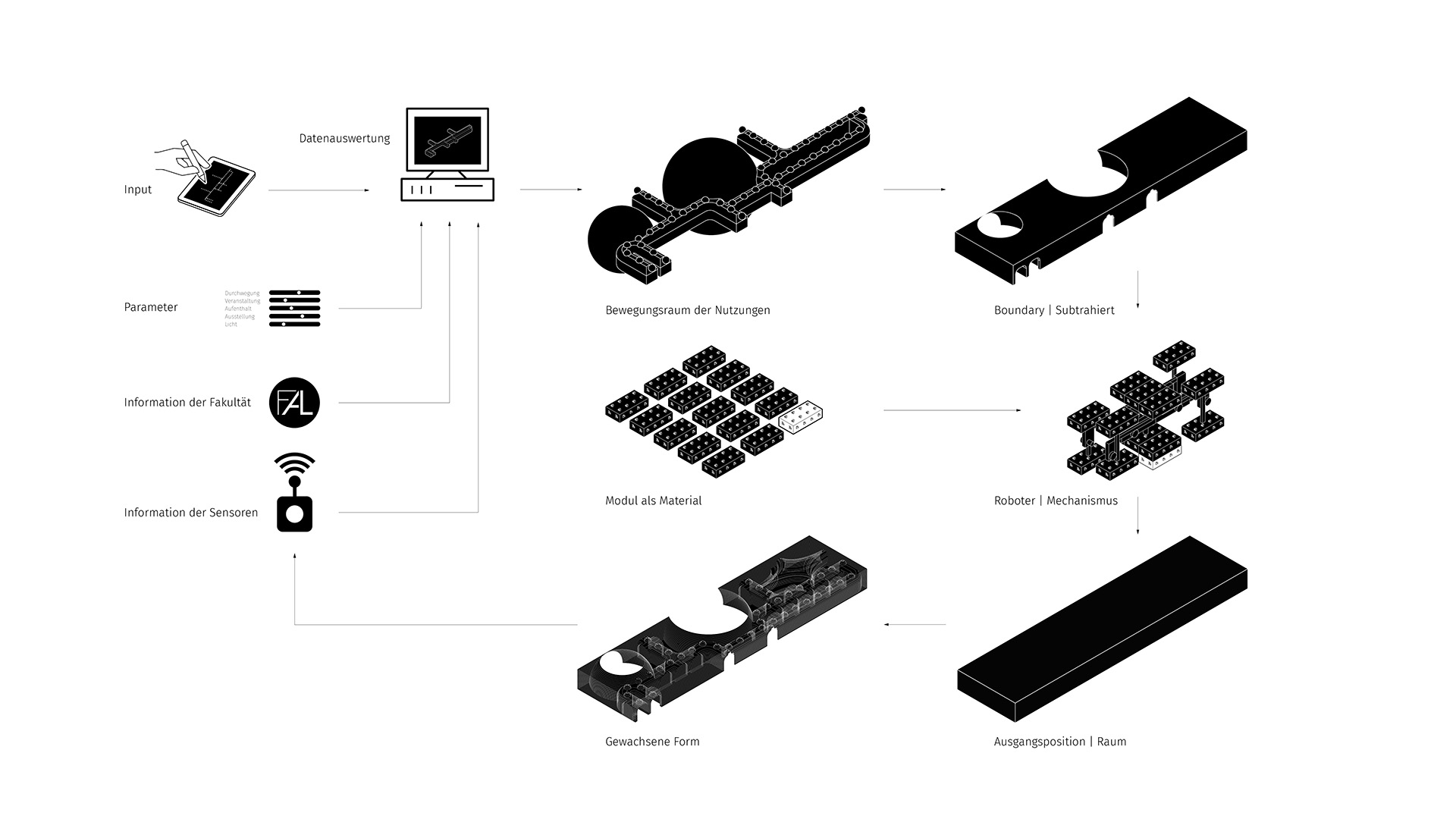
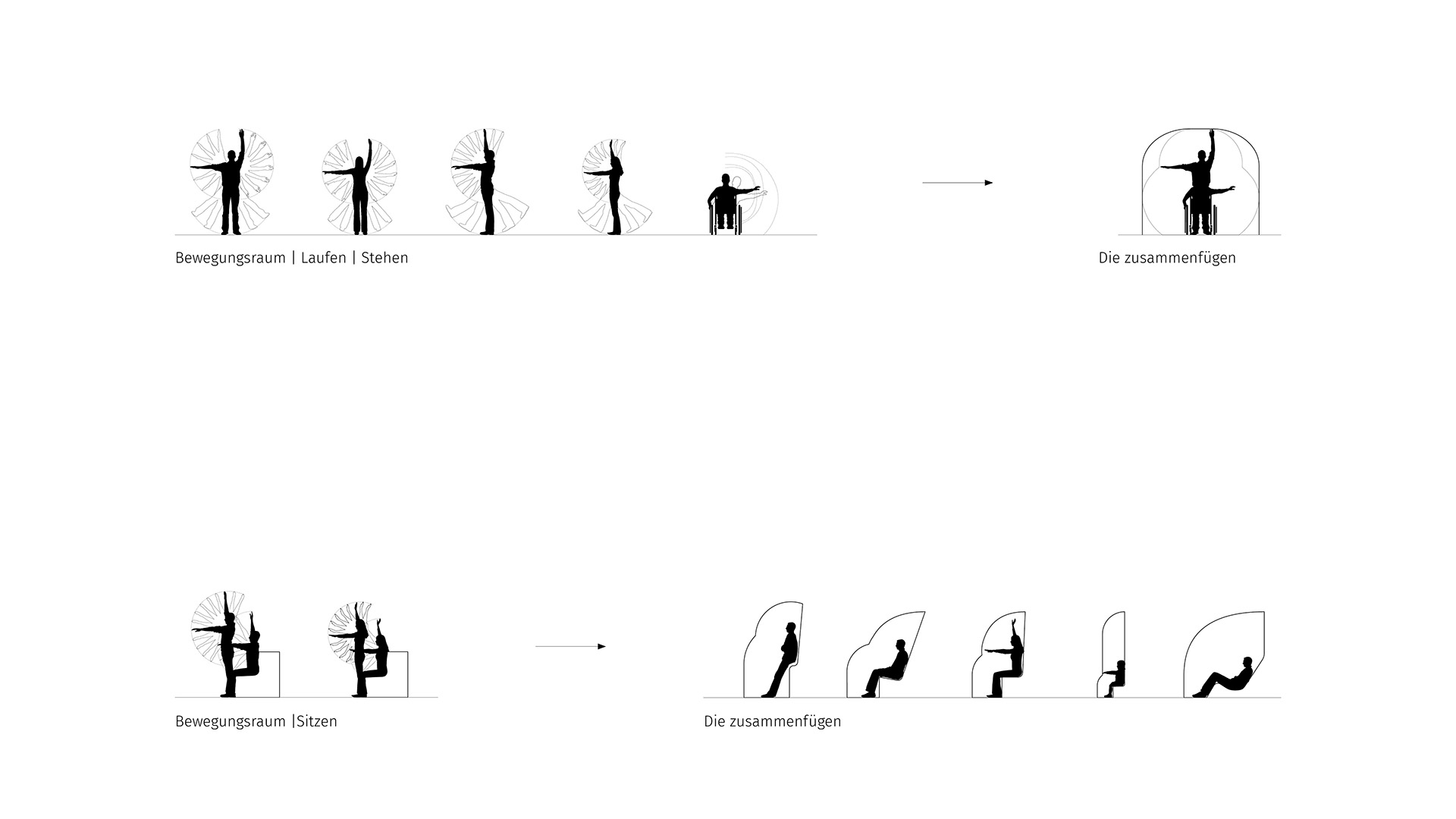
In the case study, the foyer of the Faculty of Architecture and Landscape Sciences is used to test how far an open multi-purpose room can be shaped and programmed by an adaptable installation. In this example, human reach is the space-shaping parameter.
The foyer is primarily determined by the four uses of passage, event, exhibition and stay. Each use is assigned to the different spatial volumes according to its prioritisation. This results in a staggering of the rooms as a form that is subtracted from the spatial volume of the foyer. What remains is a form - the boundary - in which the blocks can be placed. Since this creation of the form does not take into account any artificial lighting nor sunlight, each boundary is additionally resolved with the generated volumes of the sunlight vectors at the window areas. The designer can decide which type of module and which type of pattern, at which position of the boundary should be created. Thus, desired spatial and visual references are possible at a later date.
As soon as the robots start to insert the modules in the areas of the boundary, the sensors start to collect the usage tendencies. The system can learn from the resulting information and actively respond to current usage. The longer the system learns and improves in a room, the better the room can transform itself according to the usage tendencies.
Info
Author:
Jascha Baumgardt
First Examiner:
Prof. Mirco Becker
Second Examiner:
Prof. Tobias Nolte
Summer Semester
2020
Videos: