

Abstract
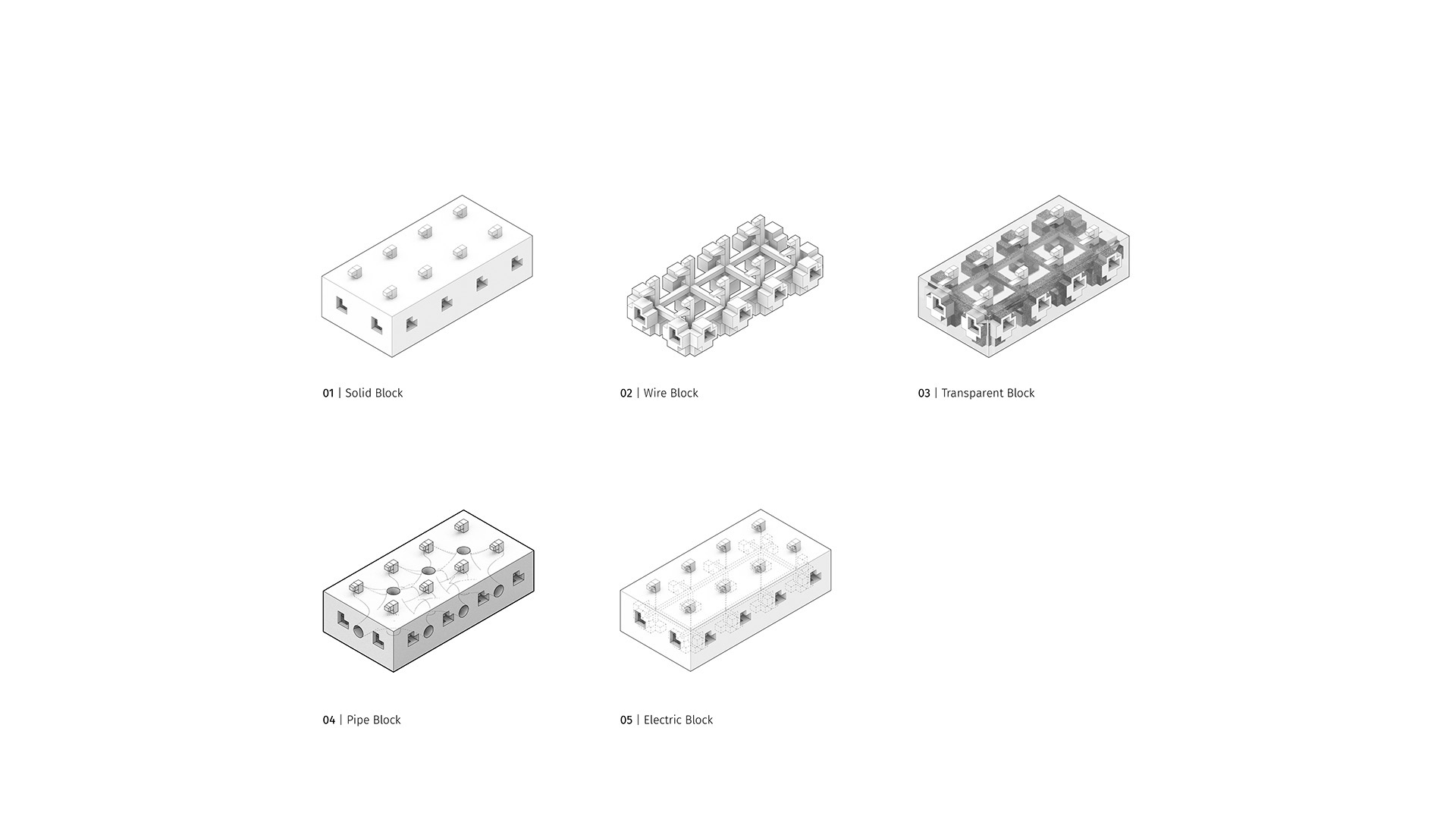
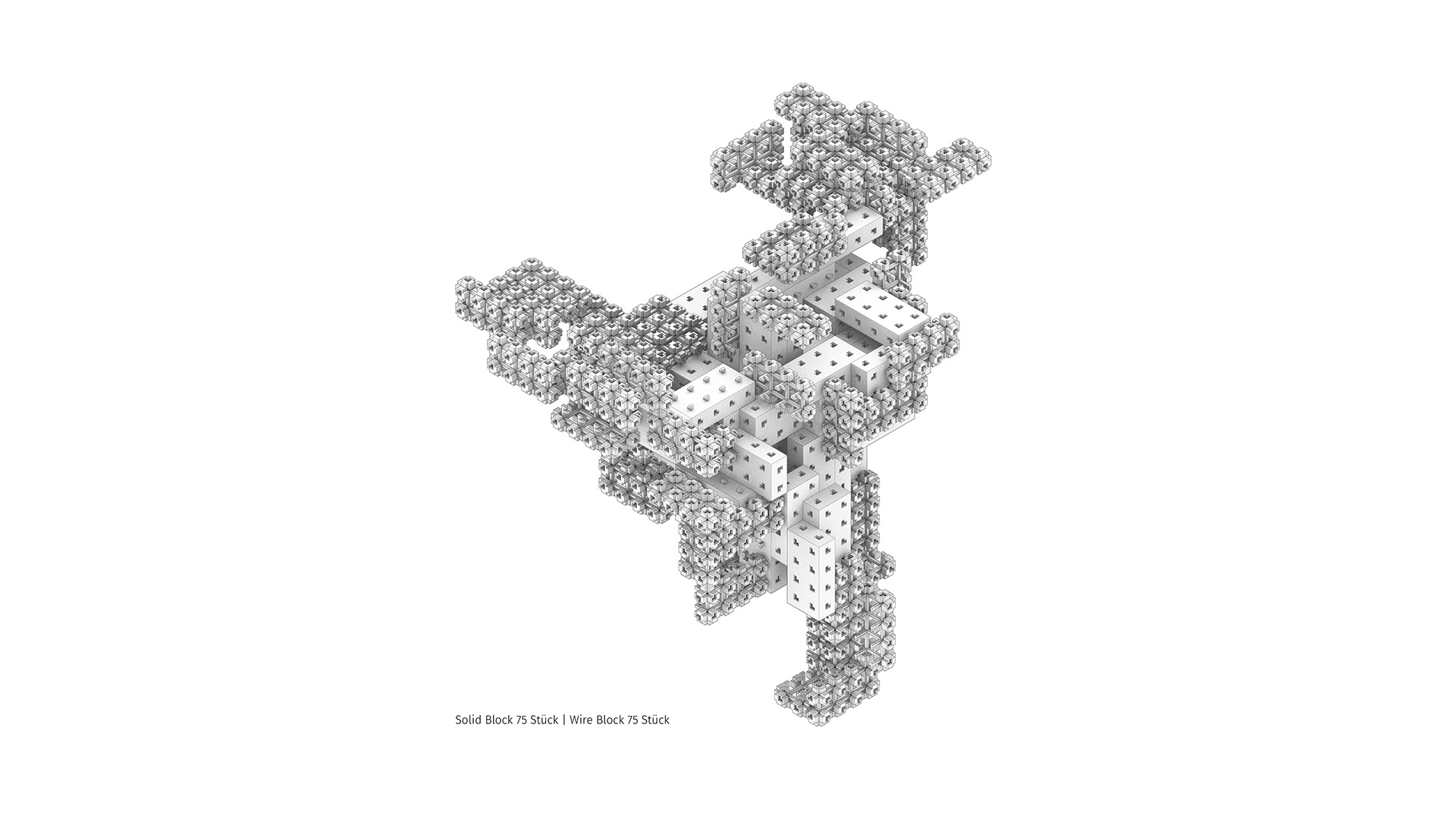
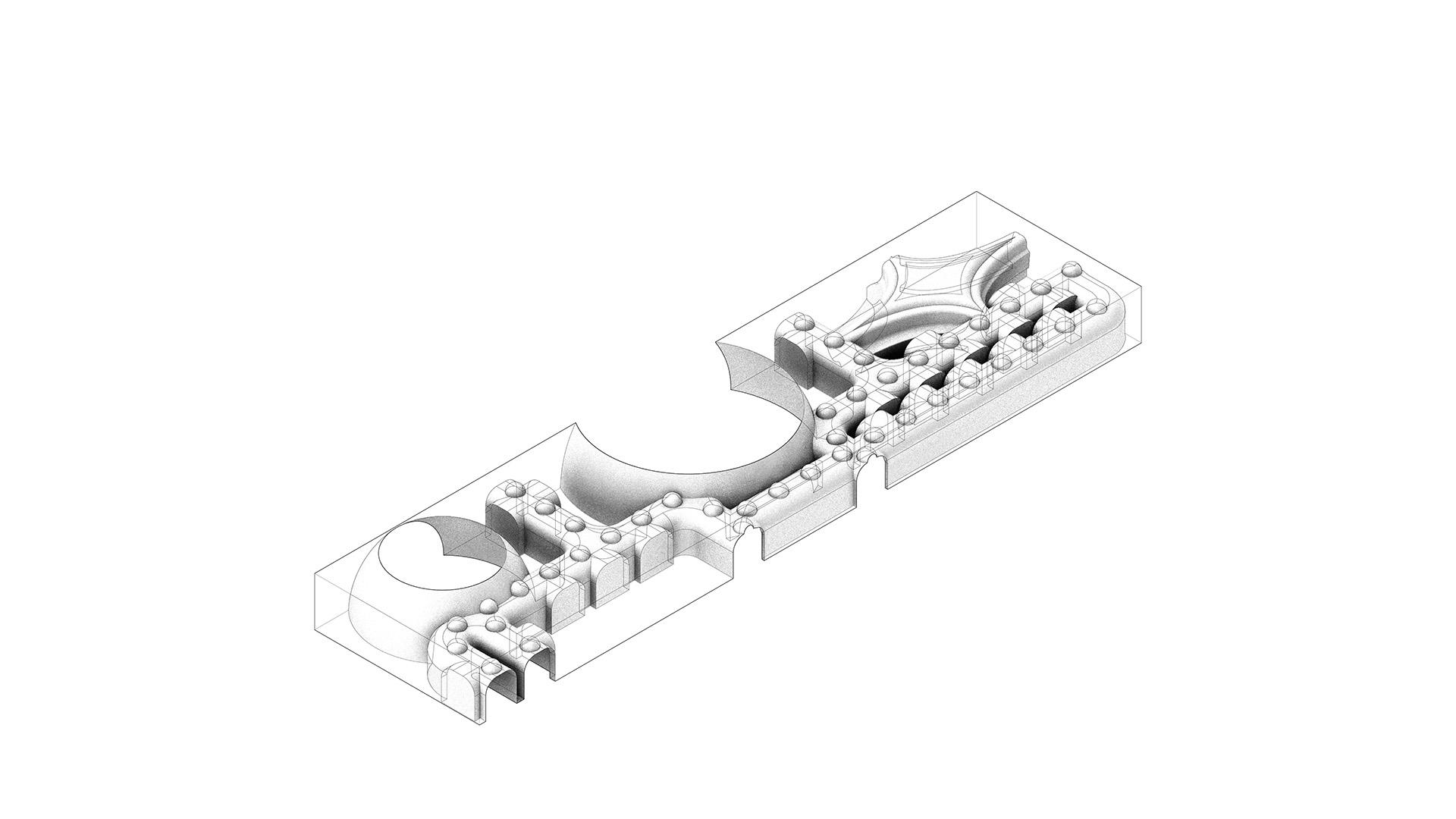
In dieser Arbeit wird die Entwicklung eines Moduls und dessen Verbindung durch Steckmechanismen getestet. Die auf Drehmomente und Zugkräfte belastbare Verbindung, kann durch die Größe des Moduls (15mmx30mmx60mm) eine Vielzahl an Formen und Volumen bilden. Stellt man sich vor diese Module würden in einer großen Masse zu einer raumgroßen Aggregation verbunden werden, ist dabei der Übergang der erzeugten Volumen zwischen Architektur und Mobiliar fließend.
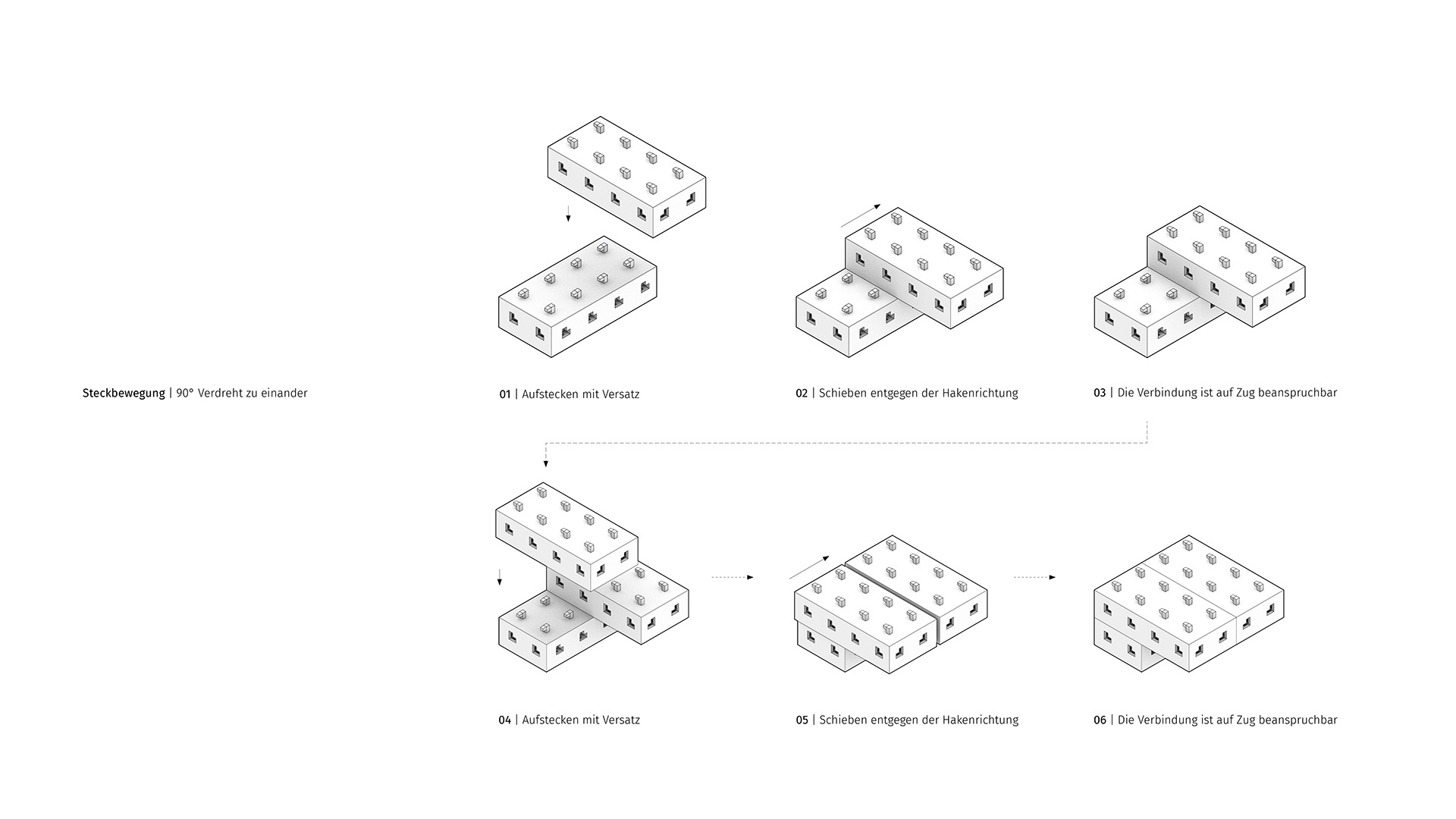
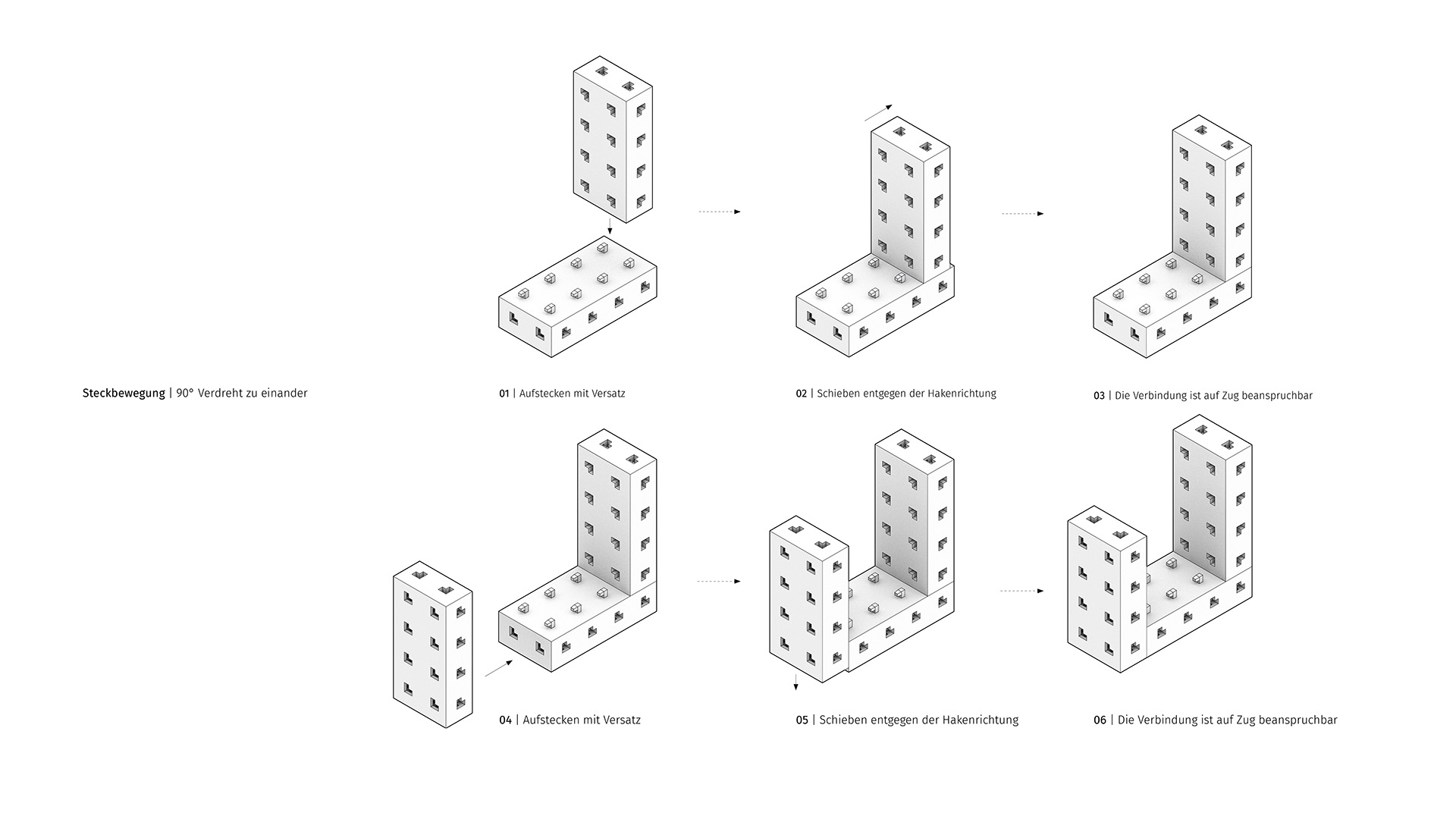
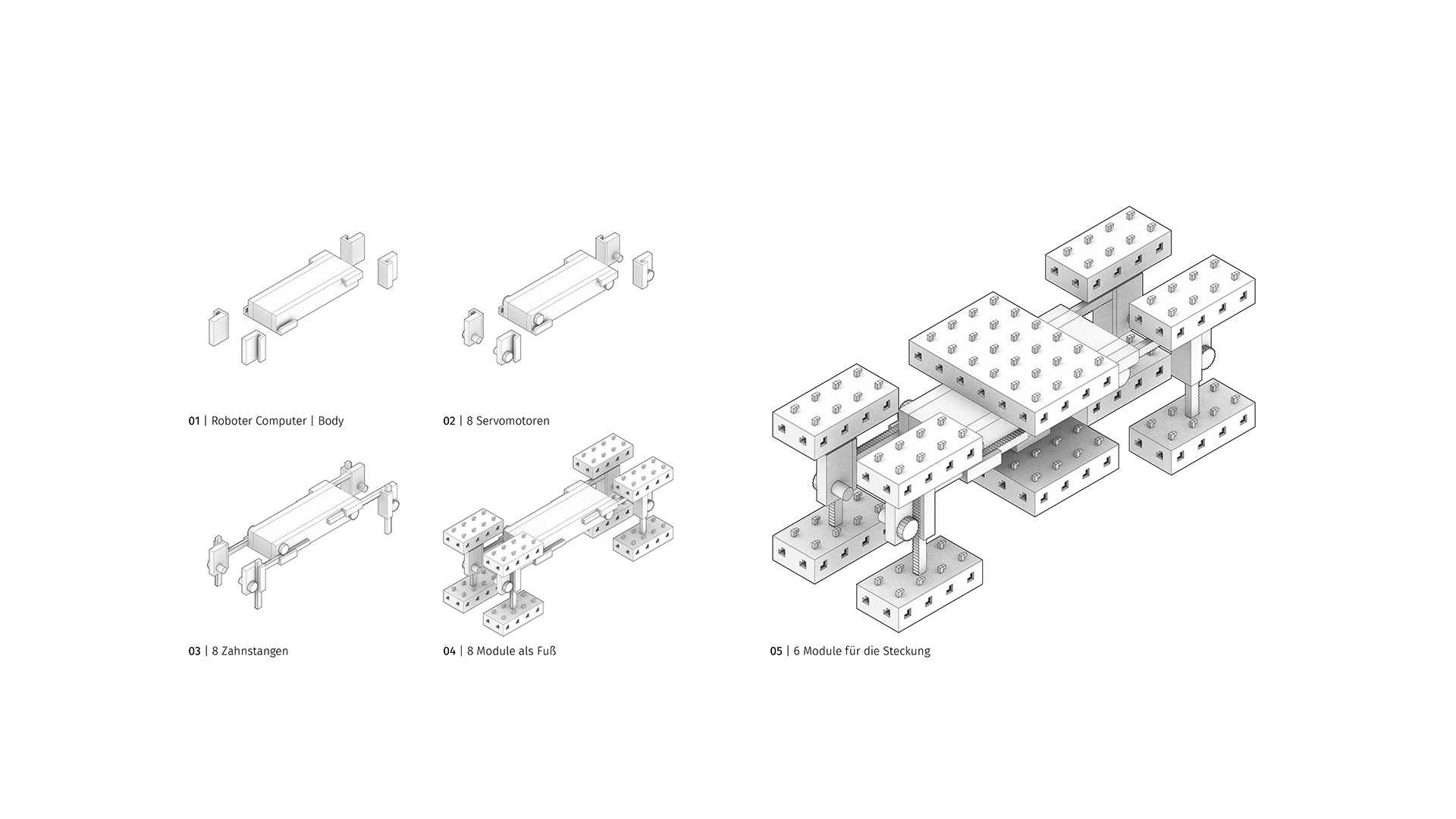
Da der Mechanismus der Steckverbindung bei der Montage mehr Platz benötigt, als die Größe die das Modul definiert, ist die Reihenfolge der zu steckenden Module maßgeblich und erfordert einen großen logistischen Aufwand, welcher durch Roboter ermöglicht werden kann.
Die Roboter, welche die Aufgabe der Streckung und der Fortbewegung übernehmen, bestehen zu Teilen selbst aus den Modulen. In diesem System ist es durch den Mechanismus möglich in X-, Y-, und Z- Richtungen (oben, unten, seitwärts) die Module von Robotern stecken zu lassen.
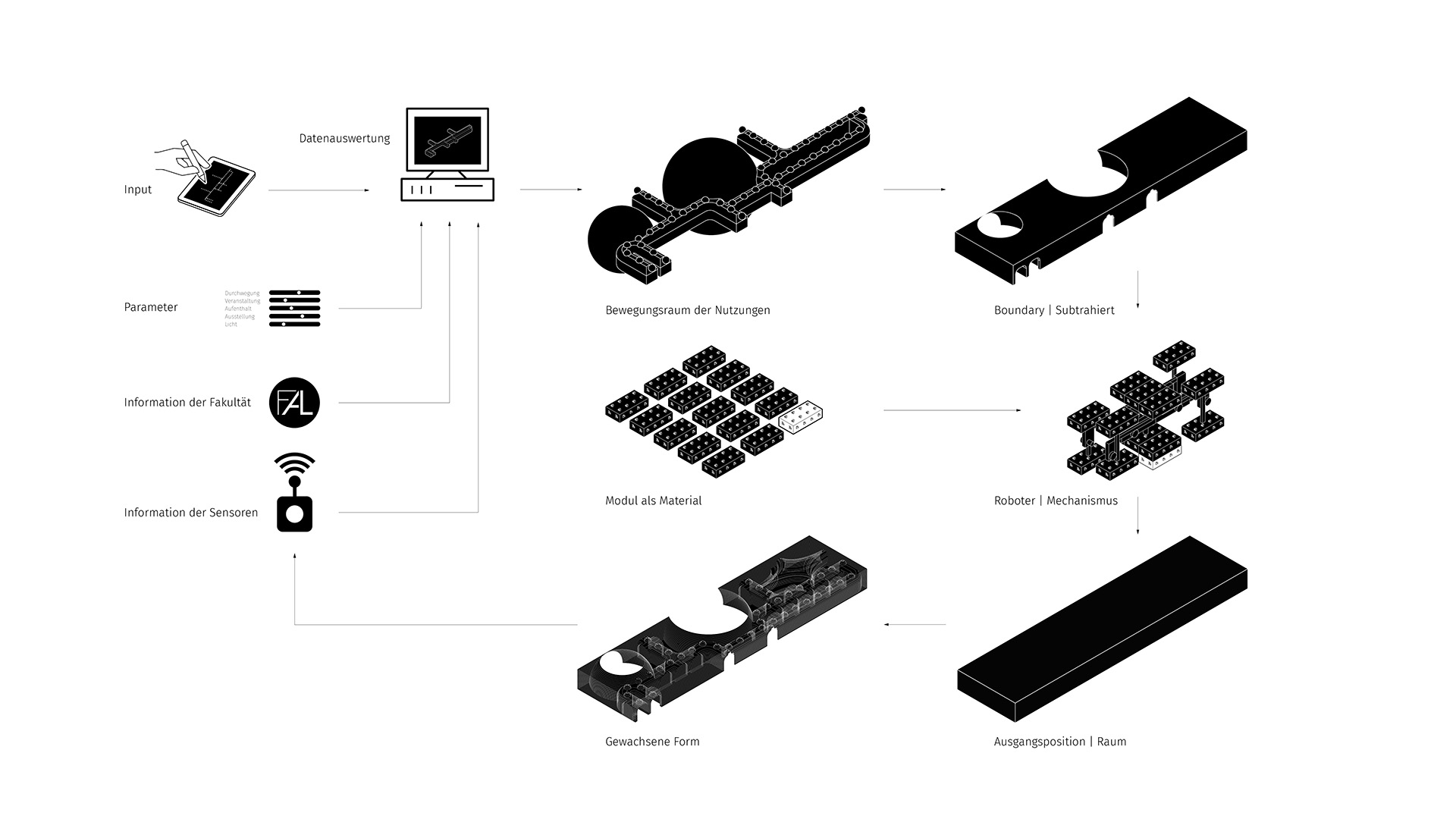
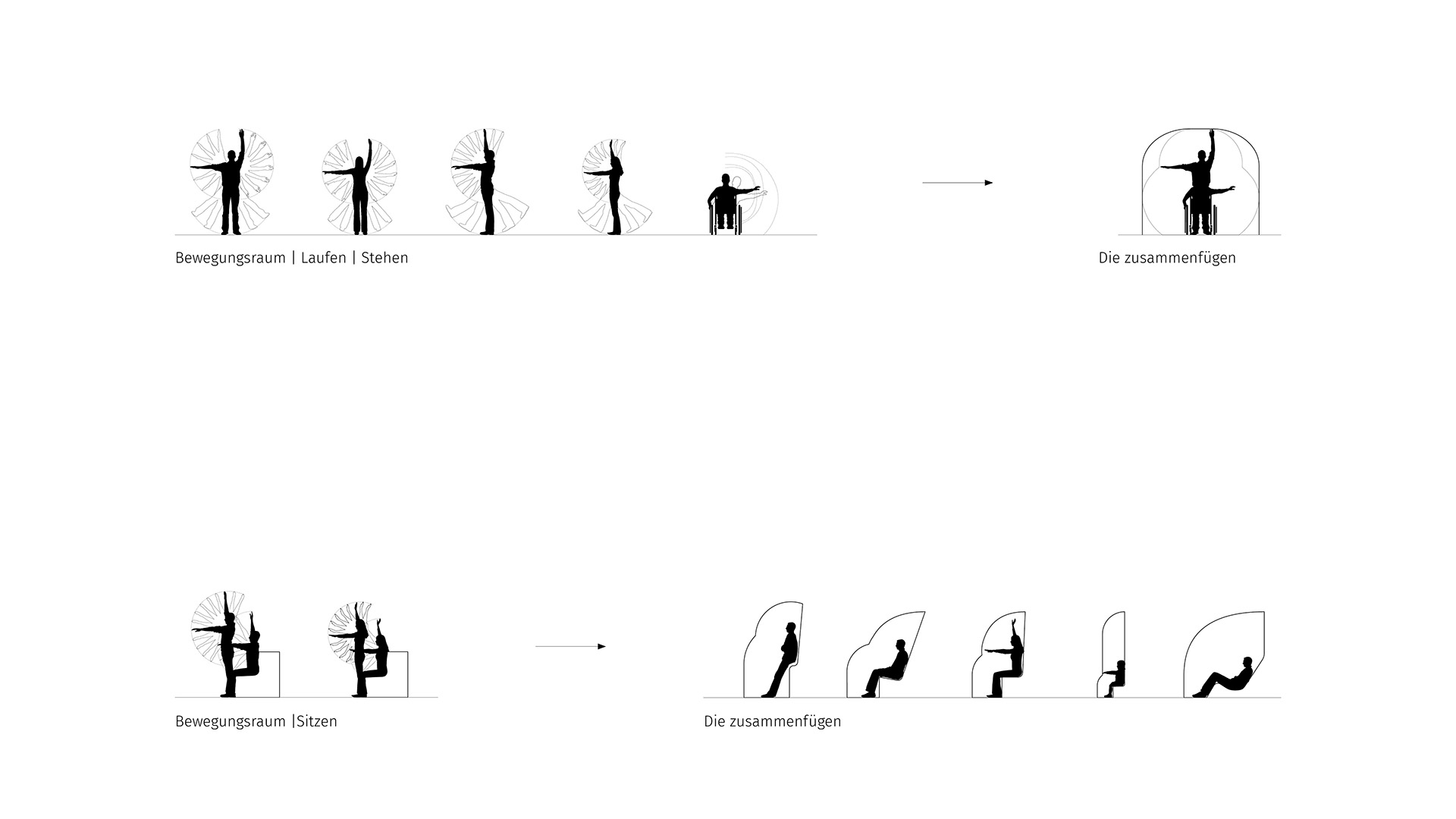
In der Case Study wird das Große Foyer der Fakultät für Architektur und Landschaft genutzt, um zu testen, in wie fern ein offener Mehrzweckraum durch eine anpassungsfähige Installation geformt und programmiert werden kann. Bei diesem Beispiel ist der Mensch und sein Bewegungsraum der raumformende Parameter.
Das Foyer ist durch die vier Nutzungen Durchwegung, Veranstaltung, Ausstellung und Aufenthalt primär determiniert. Jede Nutzung wird, entsprechend ihrer Priorisierung, den verschiedenen Raumvolumen zugeordnet. So entsteht eine Stafflung der Nutzungsräume als Form, die aus dem Raumvolumen des Foyers subtrahiert wird. Übrig bleibt eine Form - das Boundary - in dem die Steine gesteckt werden können. Da bei dieser Erstellung der Form, weder Lichtbezüge noch Sonnenlicht berücksichtigt werden, wird jedes Boundary zusätzlich mit den erzeugten Volumen der Sonnenstrahl-Vektoren in den Fensterbereichen aufgelöst. Der Entwerfede kann entscheiden, welcher Art Modul und welche Art von Muster, an welcher Steller des Boundaries entstehen soll. Somit sind gewollte Raum- und Sichtbezüge nachträglich möglich.
Sobald die Roboter anfangen in den Bereichen des Boundaries die Module zu stecken, fangen die Sensoren an die Nutzungstendenzen zu sammeln. Das System kann durch die entstehenden Informationen lernen und aktiv auf aktuelle Nutzung eingehen. Je länger das System in einem Raum lernt und sich verbessert, desto besser kann sich der Raum entsprechend der Nutzungsvorkommen transformieren.
Informationen
Bearbeiter:
Jascha Baumgardt
Erstprüfer:
Prof. Mirco Becker
Zweitprüfer:
Prof. Tobias Nolte
Sommersemester
2020
Videos: