Projekt
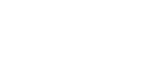
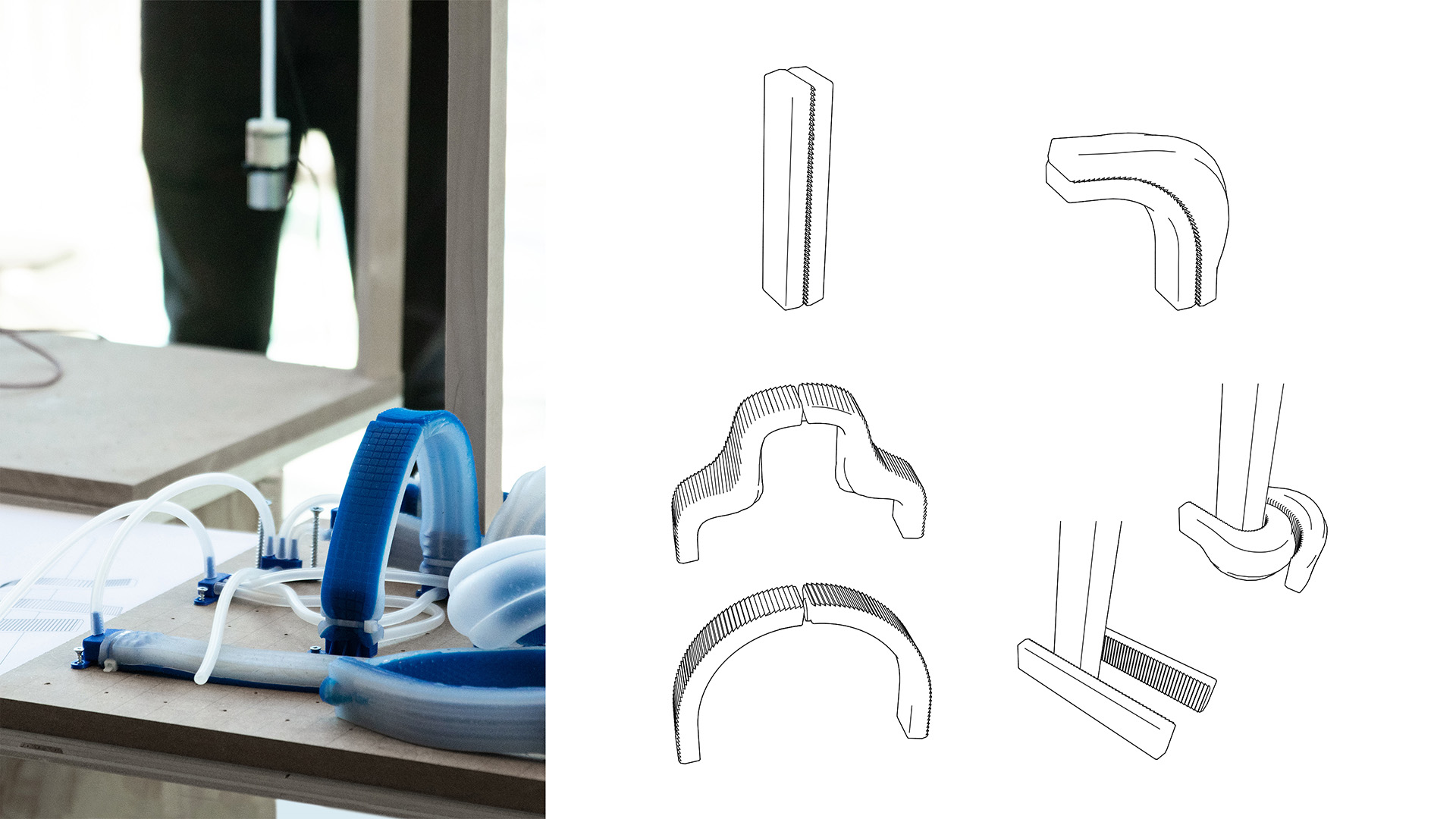
Ziel des Workshops ist es, eine vernetzte Aggregation von Soft Robots als reaktionsfähige Architekturinstallation zu animieren. Soft Robots, die auf nachgiebigen Mechanismen wie pneumatischen Muskeln basieren, bieten eine Ansteuerung mit geringer mechanischer Komplexität. Sie sind robust und billig, aber oft unscharf in Bezug auf Präzision und Vorhersagbarkeit. Dieses Defizit wird durch Sensor-Feedback-Schleifen kompensiert. Während die Steuerung solcher Systeme gut verstanden ist, ist die Simulation ihres geometrischen Verhaltens noch unterentwickelt. Im Verlauf des Workshops hoffen wir, die Freude an der Arbeit mit lebensähnlichen Soft Robots zu teilen sowie einige schwierigere Simulationsaufgaben bezüglich ihrer geometrischen Ansteuerung und Interaktion anzugehen. Wir werden das Fachwissen und die Hardware mitbringen, um pneumatische Soft Robots zu entwerfen, zu simulieren und zu bauen. Im Rahmen des Workshops werden die Teilnehmer die Möglichkeit haben, ihren eigenen Softroboter aus 3D-gedruckten Formen zu bauen, eine vernetzte Baugruppe mit verschiedenen Aktorik- und Sensormodi zu entwerfen oder die geometrischen und kinetischen Eigenschaften verschiedener Softroboterkonstruktionen zu untersuchen. Im Rahmen unserer laufenden Forschung an der Abteilung für digitale Methoden in der Architektur (dMA) entwickeln wir ein Arduino-ähnliches Ökosystem aus elektronischen Platinen (Nodes), das die Plug-and-Play-Metapher von visuellen Programmierwerkzeugen wie Grasshopper auf den Bereich des Physical Computing ausdehnt. Dies ermöglicht es Designern, schnell eine Reihe komplexer Ideen zu prototypisieren, ohne sie durch zusätzliche Hürden bei der Hardware-Montage und Codierung zu zwingen.
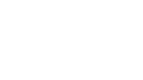
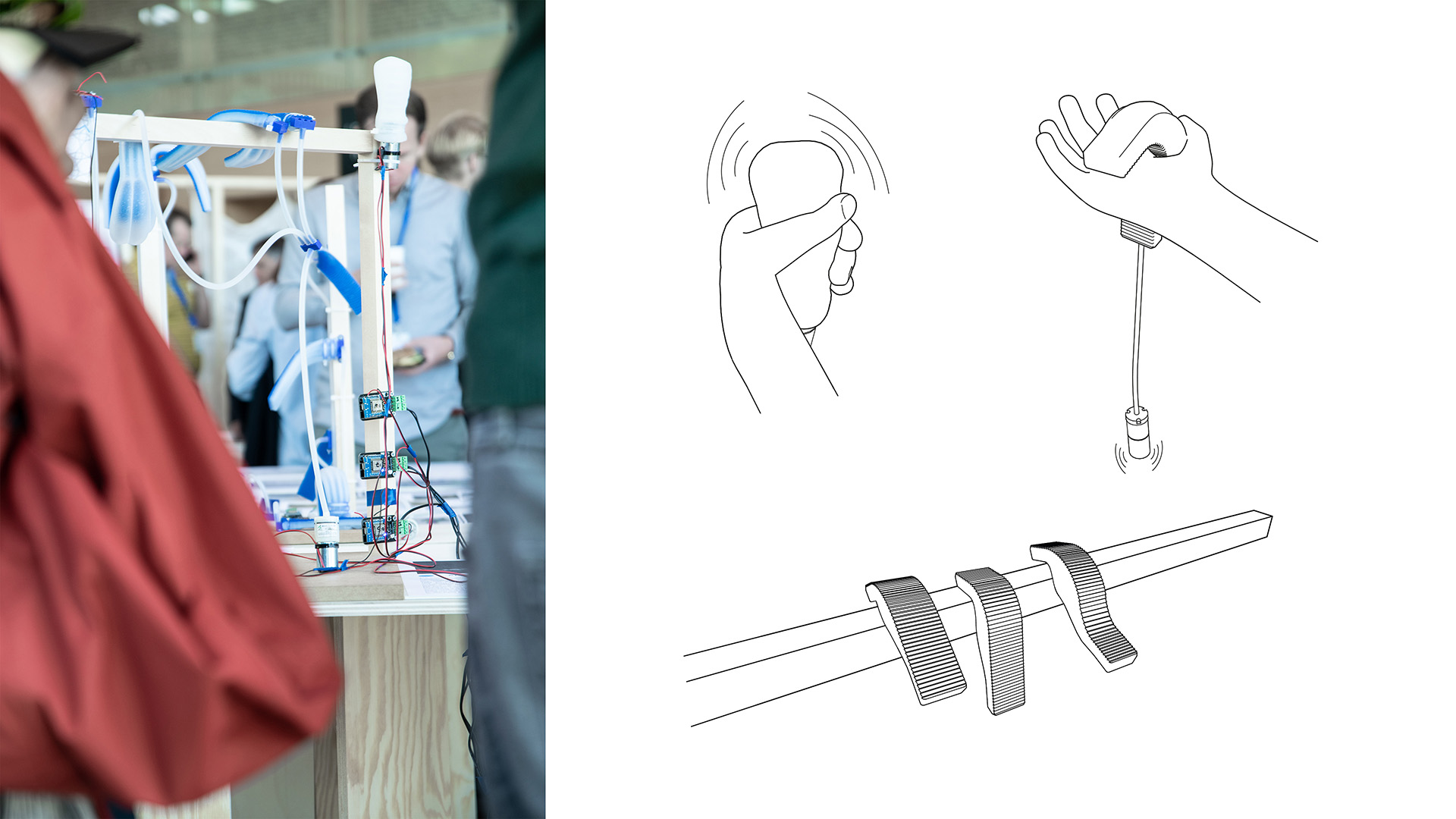
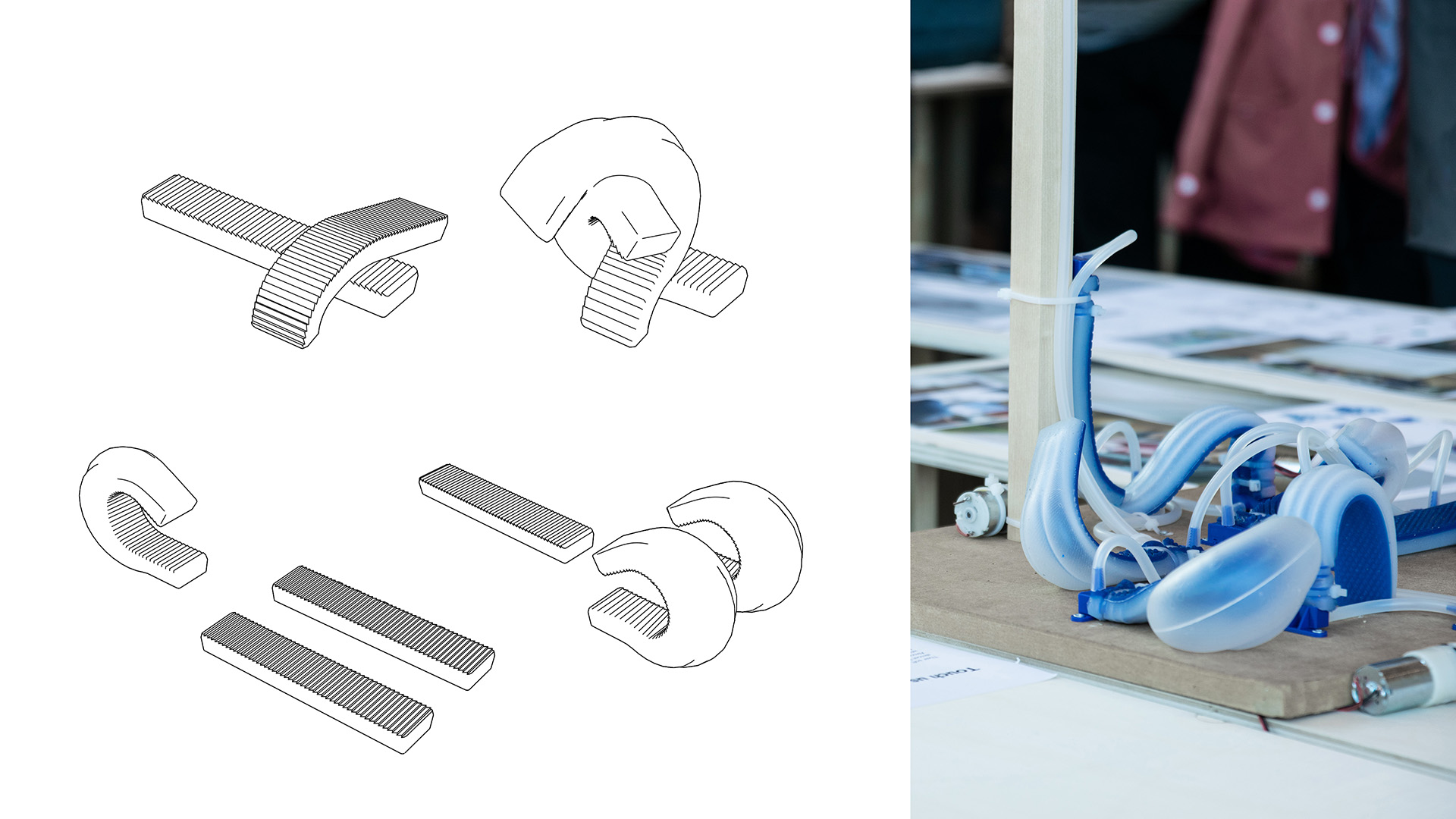
Für den Kontext dieses Workshops wurde eine Sammlung von Ein- und Ausgabeknoten bereitgestellt. Die Eingabeknoten ermöglichten es den Teilnehmern, schnell Daten aus der physikalischen Welt abzufragen und in ihren Entwurf einzuspeisen. Die Ausgabeknoten ermöglichten es ihnen, Aktorik in den Soft Robots auszulösen. Hier erlaubt der Einsatz von Soft Robots als Aktoren einen spielerischen Ansatz durch ihre inhärent langsamere, organischere Natur. Im Vergleich zu harten Motoren auf sich schnell bewegenden Gleitschienen oder der digitalen Aktorik durch Elektromagneten setzen Soft-Robot-Aktuatoren aufgrund ihrer oft unerwarteten, organischen Natur weniger eine Agenda in den Designprozess, so dass der Konstrukteur seine ursprünglichen Absichten herauskitzeln kann, anstatt sich einem vorgefassten Ideensystem anzupassen.
Dies wirkt sich positiv auf neu entstehende Designbereiche wie Wearables oder ansprechende architektonische Umgebungen aus, in denen Versuche, industrielle Interaktionsmethoden zu überlagern, oft scheitern. Diese sind im besten Fall eine unangenehme Gegenüberstellung und im schlimmsten Fall eine unangenehme und möglicherweise gefährliche Interaktion. Im Zusammenhang mit Wearables und Körperinteraktion im Allgemeinen passen Soft Robots aufgrund ihrer Anpassungsfähigkeit gut in das Feld. Entweder um sich zu bewegen oder um Druck auf den Träger auszuüben als Teil einer VR / AR-Erfahrung oder sogar als subtile Benachrichtigung, wie ein sanfter Druck auf den Arm. Im Kontext der Architektur sind Soft Robots eine sehr plausible Möglichkeit, die von uns bewohnten Räume zu digitalisieren. Noch einmal: Standardmechanische Aktoren sind oft gefährlich, wenn sie menschliche Räume mitbewohnen. Denken Sie nur an all die Sensoren an einer Zugtür, um Verletzungen der Passagiere zu vermeiden, oder an all die Notfallknöpfe auf Rolltreppen.
Soft Robotics knüpft auch an funktional abgestufte Materialien an, wo sie es ermöglichen, dass ein Element eine Zeit lang steif und dann später verformbar wird, indem ein auf die Reservoirs ausgeübte Druck moduliert wird. Ein offensichtliches Beispiel sind reaktionsfähige Architekturfassaden oder Fassaden, die spezifische Mikroklimata schaffen. Es sind neuartige Arten der Animation möglich, denken Sie nur daran, wie eine Arbeitsfläche mit einer weichen Robotermatrix die darauf platzierten Gegenstände sortieren könnte, oder unterstützen Sie die Fertigung, indem Sie die Komponenten so anordnen, dass sie den Monteur führen.
Die Teilnehmer des Workshops werden die Möglichkeit haben, die Bewegungsarten, für die sich die Aktoren eignen, im digitalen Bereich zu erleben, bevor sie in der Lage sind, Designstrategien und Aggregation unter Verwendung vorgefertigter Soft-Robot-Aktuatoren sowie physischer Knoten zu deren Steuerung zu erstellen. Der Schwerpunkt wird auf der Suche nach architektonischen Konzepten liegen, wie eine Aggregation von Soft-Robot-Aktuatoren einen animierten architektonischen Raum schaffen kann, indem die Beziehung zwischen Geometrie, Material und daraus resultierender Aktorik untersucht wird. In diesem Zusammenhang werden die Teilnehmer eine Aggregation von bis zu 64 animierten Soft Robots entwickeln, die während der Konferenztage der AAG 2018 zu sehen sein werden.
Dieser Text wurde aus dem Englischen übersetzt.
Informationen
Beteiligte:
- Jan Philipp Drude
- Pieter Francois Theron Burger
- Tim Germershausen
- Marc Schulz
Workshops:
Workshop 7: Architectural Soft Robot Aggregations
AAG 2018, Göteborg
Links:
- Workshop Info unter AAG2018